
【导读】自重构??榛魅擞梢恢只蚣钢中翁哪?楣钩?,??橹淇梢酝ü嗤牧臃绞阶楹铣刹煌男翁⑶铱梢酝ü幼爸么萘?、力矩以及交换信息。这种机器人可以像传统的机器人一样通过改变关节变量来调整姿态,做出不同的行为,例如抓取、操纵和移动,同时还可以对自己的形态做出很大程度上的改变,即通过改变模块之间的连接方式实现了关节拓扑结构的改变,从而更好地适应不同的环境、行动或任务。
一、引言
自重构??榛魅擞梢恢只蚣钢中翁哪?楣钩?,模块之间可以通过相同的连接方式组合成不同的形态,并且可以通过连接装置传递力、力矩以及交换信息。这种机器人可以像传统的机器人一样通过改变关节变量来调整姿态,做出不同的行为,例如抓取、操纵和移动,同时还可以对自己的形态做出很大程度上的改变,即通过改变模块之间的连接方式实现了关节拓扑结构的改变,从而更好地适应不同的环境、行动或任务。自重构模块化机器人一般分为三种类型:chain-type, lattice-type和mobile-type [1]。SMORES-EP(图1)是一种混合类型机器人,可以实现上述三种类型的??榛魅说乃性硕问?。
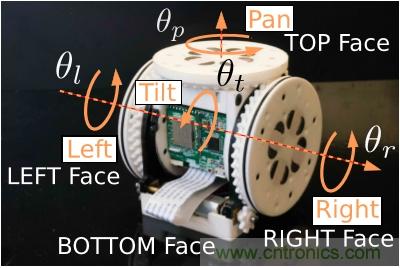
每个SMORES-EP模块有四个EP-Face连接器[2] 和四个自由度,独特的运动学结构使得任意两个??橹浯嬖谧?7种连接方式,因此SMORES-EP??榭梢宰槌芍掷喾倍嗟牟煌翁词视Σ煌幕肪澈腿挝瘛1热缭谕?a中,7个SMORES-EP模块组成了一个可以快速移动的小车的形态,从而能够快速地在地面上移动完成探索、运输等任务,但是当遇到崎岖不平的洼地时,这种小车形态并不利于运动,因此这些??榭梢员湫纬缮叩男翁ㄍ?b),从而可以通过这类地形[3]。
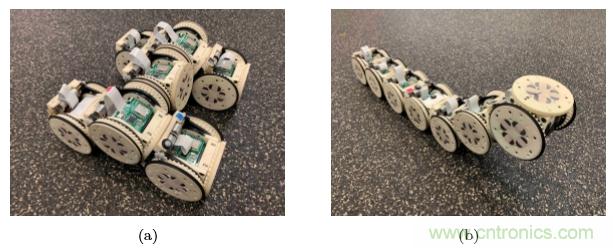
图 2:(a)7个SMORES-EP??榭梢孕纬梢桓隹梢钥焖僖贫男〕担?从而能够快速移动;(b)同时可以变形成一条蛇来通过崎岖的地形。
每个SMORES-EP??榈淖舐趾陀衣至礁鲎杂啥雀秤枇似湓诘孛嫔弦圆罘智〕档男问阶杂稍硕哪芰?,这个特性使得每个??榭梢远懒⒂谄渌?榈ザ涝硕E浜蟂MORES-EP的自重构能力,多个??榭梢员硐殖鲆欢ǖ娜禾逍形@嗨朴谧匀唤缰猩锏娜禾逯腔坌形?,比如一只小蚂蚁的行为能力极其有限,但是一群蚂蚁却能够表现出惊人的、极大超出每个个体能力极限的行为。
一个SMORES-EP??樗淙挥?个自由度,但是运动能力有限,能适应的环境和任务场景也因此收到了很大限制,例如一个模块是无法通过一道较宽的沟壑的,但是三个??榭梢宰槌梢桓錾咝未佣ü獾拦帝?。多个分散的模块协同工作、自主拼装成一个复杂形态的能力可以极大地增强这类??榛魅说氖视δ芰?,使其完成任一单独的模块均无法完成的任务,这个运动规划过程称之为self-assembly planning。
二、??榛魅瞬⑿凶宰樽?/div>




1、机器人形态模型
一个??榛魅诵翁ㄍ仄私峁梗┛梢杂靡桓鑫尴蛲糋 =(V,E)来表示,其中V是G的顶点的集合,代表着所有的???,E是G的所有边的集合,每条边包含着表示??榧涞牧臃绞降谋匾畔?,这些信息取决于??榛魅说纳杓疲?]。任意两个顶点间存在唯一一条路径的无向图是树,一个树G=(V,E)可以相对于某个顶点转换成有根树,我们选取图的中心[5]为根节点模块。我们在[4]中提出了一个线性时间复杂度的算法来找到一个树状拓扑结构的模块化机器人的中心。例如,图3a是一个由三个 SMORES-EP组成的简单形态,对应的图G=(V,E)表示在图3b 中,其中根??槭?号???。
图 3:(a)三个SMORES-EP组成的一个形态和(b)对应的图G=(V,E)。
2、并行自组装
我们这里提出一种可以并行的自组装方法。已知的条件是每个??榈鼻暗奈恢茫ㄍ?a)以及期望的最终形态(图4b)。首先要解决的是最优地找到每个??槎杂Φ阶钪招翁械慕巧?。所有SMORES-EP??槎际且荒R谎模虼瞬⒚挥泄潭ǖ慕巧峙浞桨?,但是好的分配方案可以使组装的过程更快、更容易。我们这里期望所有模块需要运行的距离能够最短。为了达到这个目的,首先将目标形态展开到地面上、计算根???,基于根???,可以快速计算出其余每个??榈?D位姿?;谙质抵忻扛瞿?榈鼻暗奈恢?,我们可以通过解决一个任务分配(task assignment)的问题来找到最优的分配方案。
图 4:(a)七个??榈某跏甲刺?;(b)期望变成的形态。
当每个??槎急蛔钣诺胤峙淞讼嘤Φ慕巧螅宰樽氨憧梢钥?。从根??榭?,处于同一深度的??榭梢酝笨甲樽暗墓蹋钡剿写τ谝蹲咏诘愕哪?橥瓿勺钪盏淖樽岸?。一个组装动作可以简单表示成一个元祖(mi, ci,mj,cj),代表着将模块mi的连接器ci与??閙j的连接器cj相连接。对于??榛魅?,这个对接的过程往往费时费力,因此我们提出一种可靠的方法来保证对接的成功。就像把大象放进冰箱一样,我们把对接的过程分成三步:第一步是导航,即控制SMORES-EP ??榭焖傥榷ǖ氐酱镆桓鼋咏康牡氐牡胤剑ㄍ?a),在这个过程中需要对多个??榻新肪豆婊?; 第二步是调整姿态准备对接(图5b); 第三步是靠近对应??橥瓿啥越樱ㄍ?c)。详细的控制器设计及其表现可以查看我们的论文。
图 5:执行组装动作(3,T,4,B)。(a)控制 3 号??榈己街烈桓鼋咏勘甑?位置,(b)调整姿态准备对接,(c)靠近 4 号模块完成对接。
三、 实验及结论
在论文和视频中我们演示了三个实验:
1.7个分散的??樽宰樽俺梢桓龃谢当鄣男〕荡佣梢越哟ジ咛ǎㄍ?b);
2.9个分散的??樽宰樽俺梢桓隹梢匀我夥较蛞贫男〕担ㄍ?a);
3.7个分散的??樽宰樽俺梢桓霾罘智穆殖荡佣梢酝贫匚铮ㄍ?b);
图 6:(a)9 个分散的模块自组装成一个可以任意方向移动的小车;(b)7 个分散的模块自组装成一个差分驱动四轮车从而可以推动重物。
在这三个实验中我们展示了并行自组装的全过程,验证了我们的方法和对接控制的可靠性。在第三个实验中,特殊的地方是需要helping module的帮助来完成一些组装的动作。单个??橐览底笥衣纸性硕虼嗽诙越拥氖焙蛭薹ㄖ苯涌刂普饬礁隽悠鞯慕嵌?,需要一个helping module辅助抬起??橐酝瓿闪悠鹘嵌鹊牡髡?。关于这个工作更多的内容可以在ModLab网站的post查看,也可以在SMORES-EP项目主页上查看更多关于SMORES-EP的研究工作。
免责声明:本文为转载文章,转载此文目的在于传递更多信息,版权归原作者所有。本文所用视频、图片、文字如涉及作品版权问题,请电话或者邮箱联系小编进行侵删。


