
【导读】接触过很多机器人爱好者,大都对机器人技术展示出了浓厚的兴趣,也在计划如何动手制作自己的第一个机器人。但是似乎很多人都摸不到门路,只能站在大门外满怀兴趣的向内观望,观望了一阵兴趣渐失只好叹口气走开……
很多初学者可能都是看了一些视频或是现场的比赛,勾起了儿时的美好回忆,兴起了自己动手制作机器人的念头,很多人可能并不是嵌入式开发的业内人士,甚至没有听说过单片机、步进电机这些名词,看着别人满地乱跑的各种机器人,颇有无处下手的感觉。有的人一上来就准备做一个可以双足行走的人形机器人,可以平稳行走,可以靠摄像头来读取环境信息,可以语音识别,最好还可以变形……

我的意见是:新手最好还是老老实实的从小车开始吧。人形机器人可以说是一个系统的大工程,不是一个人玩的起来的,而且资金上的投入也是不可计量的。一个人形机器人的成型产品最少要卖到几千块——要知道,你在开发过程中是不可能没有错误投入的?;魅诵〕导际跎厦偶鹘系?,资金投入也少,市场上的各种产品和零配件的支持也较多,虽然简单,但可以实现的功能可一点也不少。
我在这里凭自己的经验介绍一些自己动手制作机器人小车的基础知识,如果你是曾经自己动手做过的高手,那么你可以绕行,我这里介绍的都是为未入门者准备的最基本的理论知识和一些动手经验。
那么现在我们开始,首先是理论部分——小车的控制结构。
[一]小车的整体控制系统
小车是怎么来控制的?为什么小车判断出障碍物后可以自动的绕开?
理论:控制工程——处理自动控制系统各种工程实现问题的综合工程技术。包括对自动控制系统提出要求(即规定指标)、进行设计、构造、运行、分析、检验等过程。它是在电气工程和机械工程的基础上发展起来的。
闭环控制:闭环控制有反馈环节,通过反馈系统是系统的精确度提高,响应时间缩短,适合于对系统的响应时间,稳定要求高的系统。
开环控制:开环控制没有反馈环节,系统的稳定不高,响应时间相对来说很长,精确度不高,使用于对系统稳定精确度要求不高的简单的系统。
一般稍微复杂一点的机器人小车都是闭环控制,也就是说它有一个反馈机制,会根据自己配备的各种传感器来读取环境信息,并且根据这些环境信息来决定自己下一步的行动,决定好后将行动指令发给执行系统,使机器人做出合适的动作。当然也有的机器人小车是开环控制,我就见过一个机器人小车配了一支笔,将机器人放在纸上,机器人一转,刷的一下在纸上画出一个圈来,当然由于摩擦力和机械误差等原因,画出来的圆圈可能不闭合,也可能不圆。不过人家阿Q都说了:“孙子才画的圆呢……”

有点迷糊?没关系,其实简单一点说就是这样:机器人可以分为三部分——传感器部分、控制器部分、执行器部分。
传感器部分:机器人用来读取各种外部信号的传感器,以及控制机器人行动的各种开关。好比人的眼睛、耳朵等感觉器官。
控制器部分:接收传感器部分传递过来的信号,并根据事前写入的决策系统(软件程序),来决定机器人对外部信号的反应,将控制信号发给执行器部分。好比人的大脑。
执行器部分:驱动机器人做出各种行为,包括发出各种信号(点亮发光二极管、发出声音)的部分,并且可以根据控制器部分的信号调整自己的状态。对机器人小车来说,最基本的就是轮子。这部分就好比人的四肢一样。
好的,现在我们来分析一下机器人小车的避障行为控制:机器人正在行走过程中(人在路上走),忽然接收到装在机器人前部的传感器发来的一个“左前方有障碍物” 的信号(人眼发现左前方有一根电线杆),我们事先写在机器人控制芯片中的程序算法要求机器人发现左前方有障碍物就往右边转(人发现左前方有电线杆就应该往右躲——什么,你还要继续往前走?你牛!那我就等着听响了,哦,原来你只是想去看上面的小广告……),控制芯片对机器人的驱动器——或是轮子,或是双足 ——发出向右转的指令(人大脑发出向右转的指令,通俗点说就是“拐了拐了”),此时机器人的执行器部分应该立即响应控制器的指令,改变自己的状态,使机器人的前进方向改变,避开障碍物(恭喜你,躲开了电线杆)。怎么样,是不是有了点机器“人”的意思?
那么这三部分是怎么联系起来的呢?很简单:电!其实机器人小车就是一个电子作品,传感器将外部的光信号、声音信号、温度信号等全部转换为控制部分可以接受的电信号,控制系统发出的指令也是各种电信号,通过执行部分转变为电机输出的扭矩、声音、光信号等等。
下面我来分别介绍一下这三个部分。
[二]传感器部分
传感器是机器人的眼睛,想要小车完成不同的任务就要配备各种不同的传感器。
现在市场上林林总总的传感器数不胜数,一般个人机器人爱好者经常使用的有碰撞检测传感器(碰撞开关)、红外测障传感器、红外测距传感器、光敏电阻、电子温度计、电子指南针等等。
一般机器人用的传感器返回的信号分两种:一种返回值很简单,只有两个状态:“有”或者“没有”;“是”或者“不是”;“0”或者“1”。我一般习惯把这种量称为“状态量”。它所反映的是一种状态,只是简简单单的“是”或“否”。比如“机器人左边有没有障碍物”,“有没有声音信号”等?;褂幸恢址祷刂捣祷氐氖且桓鲆阎段谌我庵?,比如一只光敏电阻返回的信号就可能是0~5V范围内的任意电压信号。我一般把这种量称为“强度量”。它所反映的是一个有效范围内的强度。比如“机器人左边的障碍物有多远”,“现在的声音信号有多强”等。
“状态量”反映的信息较简单,相应的传感器也较简单,成本较低。而“强度量”反映的信息则较丰富,相应的传感器的成本就会比较高,同时给控制上也带来了更大的灵活和复杂。
下面我们来看一些常用的传感器:

碰撞开关:电路???,碰到障碍物后连通,可以用来检测机器人是否发生碰撞?! ?/div>




光敏电阻:光敏电阻器是利用半导体的光电效应制成的一种电阻值随入射光的强弱而改变的电阻器;入射光强,电阻减小,入射光弱,电阻增大。光敏电阻器一般用于光的测量、光的控制和光电转换(将光的变化转换为电的变化)。可以用来检测光线强度。
红外测障传感器:红外测障传感器利用红外线遇到障碍物会反射的原理,来检测某一方向上是否有障碍物的存在。
红外测距传感器:红外测距传感器利用红外信号遇到障碍物距离的不同反射的强度也不同的原理,进行障碍物远近的检测。红外测距传感器具有一对红外信号发射与接收二极管,发射管发射特定频率的红外信号,接收管接收这种频率的红外信号。
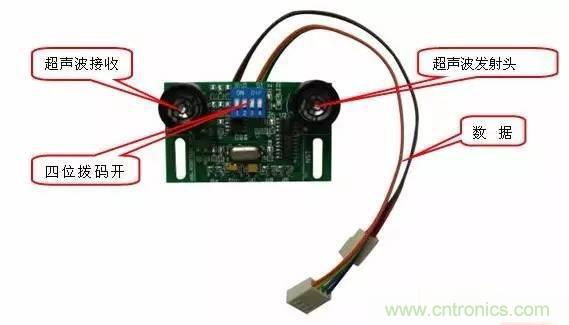
超声波测距传感器:超声波测距传感器利用声音在空气中的传输距离和传输时间成正比的原理,通过检测不同远近的反射面对超声波反射回去的时间不同来检测障碍物的距离。
对于传感器,很多人觉得只要看看文档,知道怎么用了就行。但我的建议是:不但要知道怎么用,还要知道其检测原理。只有深刻的理解了传感器的检测原理,才能具有更好的发散思维。我举一个例子:当初在学校开展机器人灭火比赛,我们用了厂家提供的地面灰度传感器依靠可见光反射来检测地面白线,效果一直不是很理想。后来有同学仔细研究了当时电机上配备的光电编码器,发现其原理就是利用红外线在不同颜色表明上反射率不同检测高速旋转的电机上黑白相间的码盘来测出电机的旋转速度,动手将光电编码器上的红外检测??椴鹣吕醋霸诨魅说撞?,用来检测地面白线,检测效果一下子好了很多。
购买途径:当地的电子市场,或是网上购买(现在很多机器人商家都有各种各样的传感器提供,其实原理和适用范围都差不多,很多都可以互换通用)。购买时需要注意的是传感器的电压范围和有效范围。
终极开发:图像识别依靠一只摄像头,根据摄像头返回的视频信号,计算出各个不同物体距自己的距离以及其运动速度等等。如果你可以迈入这一步,那么,有一门叫做“机器视觉”的学科的大门也就向你敞开了。
[三]控制器部分
适合机器人的控制芯片有很多:单片机、DSP、甚至我们计算机上所用的CPU,都可以。不过我们这里主要介绍的针对机器人小车的技术,所以把其他的先放一放,让我们把注意力放到物美价廉的单片机上来。
首先还是理论课,不要抱怨,我的信条是:不懂理论的开发者永远只能是一个拼装师。
单片机:单片机又称单片微控制器,它不是完成某一个逻辑功能的芯片,而是把一个计算机系统集成到一个芯片上。概括的讲:一块芯片就成了一台计算机。它的体积小、质量轻、价格便宜、为学习、应用和开发提供了便利条件。
小芯片有大智慧
单片机是自动控制系统中应用非常广泛的控制芯片,现在就在我们身边的许多的电器中都有单片机的身影。想自己动手制作机器人的话,相应的单片机知识是必不可少的。系统的单片机知识我这里不想多说,想要对单片机系统有一个深入的理解,还是要找一本比较好的单片机教材一页一页的看下去,网上的任何“技巧”“快速入门”(包括本文)都只能算是水果、零食之类,闲暇无事时可以拿来开开胃,真正想要吃饱吃好,还是要用大饼卷馒头就着米饭吃才行。
我这里只提一些基础的入门概念,给真正的入门者起一点抛砖引玉的作用。一块我们刚刚从商家手里拿到的单片机芯片,还是一块空白,什么也做不了。如同一个刚出世的孩子,我们开发人员要做的,就是教会单片机处理各种各样的问题,给单片机配备上各种各样的扩展工具,使单片机可以将复杂的问题简单化,数字化。
单片机开发涉及两方面:硬件、软件。单片机不同于其他电器,拿过插销直接插在电源上就可以使用,一块空白的单片机想要使用,还需要一些其他的电路来支持。一般来说,最基本的电路就是单片机最小系统:所谓的单片机最小系统就是指可以让单片机工作起来的最基本的电路,在所有的单片机系统中,你都可以找到类似的电路。至于它的原理,我这里就不累述了,找本书看去吧。
我再介绍一些做机器人需要的扩展电路:
程序下载电路:单片机最终需要程序来控制,一般都是在PC上编写好程序,通过下载线来下载到单片机中执行。下载需要一个电路来支持,以前的通常做法是连接到PC的串口,不过现在有很多通过USB下载程序的电路。
以上两个电路就是机器人开发所需要的最基本的单片机电路,其他也许还需要一些电机驱动、A/D转换、开关选择等电路。
也许你有些迷糊,可以有一点感到棘手了,这些电路对于一个从未接触过单片机的新手来说可能有些头大,没关系,现在市场上有很多成熟的单片机开发系统出售,价格极为低廉,如果不想在底层电路上多花精力的话,到一些电子商务网站上搜索一下“单片机开发板”,一百多就可以买到功能十分齐全,赠送软件+教程还有技术支持服务的适用开发板了(当然,你如果自己动手的话,成本会更低)。
软件:说白了就是你自己给单片机开发的智能程序,让机器人可以具有最简单的智能。不要看到“智能”这两个字就觉得多么高深,看到前面有电线杆知道要拐,这,就是智能。不同的单片机需要不同的开发环境,这个要在购买的时候就弄清楚,很多单片机公司都有自己配套的开发软件,很多都是可以在公司网站上免费下载。一般来说,国外的很多芯片公司在自己的网站上都有非常丰富和适用的资料,抱本英汉词典,将网站上的资料浏览一下,你会发现一切都变得十分简单。
以前一说起单片机开发就会想起汇编语言,那时候的芯片成本很高,芯片的运算开销和存储开销都要精打细算,高效率的汇编语言是单片机的最佳选择。而现在随着芯片成本的降低,开销问题已经不再是制约单片机程序开发的瓶颈,所以很多类C或Basic语言的开发环境都已经出现。只要有一定的程序开发基础,对单片机的各种引脚足够熟悉,那么相信写出一个简单的智能程序将是很容易的事。
购买途径:电子市场或是网购。现在单片机的价格已经十分低廉,价格上无需考虑太多,关键是要选择一款合适的,资料较多,容易上手的就可以。就机器人开发来说,要满足以下几个条件:有程序下载线,可以方便的将程序从PC上下载到单片机上;集成了A/D转换;有PWM输出(便于控制电机)。
终极开发:单片机终究能力有限,想要做一些运算量较大的应用时(例如音频视频的处理),就需要一些更高端的芯片,比如DSP等,或者干脆把你的电脑机箱加上几个轮子,让你的电脑跑起来吧!
相关名词:C51,PIC,AVR,PWM……啥意思?自己搜去!
[四]执行器部分
对于机器人小车来说,最基本的执行器部分就是轮子。要有轮子,小车才能被称为小车。这部分可能也是各位爱好者最发愁的部分,传感器和控制器到处都有的卖,而一般适合机器人小车上用的轮子,机械结构,车体等部分却很难寻觅。找人订做成本极高,现在很多朋友都用玩具小车来进行改装。其实现在已经开始有机器人小车底盘出售,不过在电子市场很难见到,多数都要在网上一些教育机器人公司的网店里邮购。
机器人常用的电机分为三种:普通的直流电机、步进电机、伺服电机。
直流电机:输出或输入为直流电能的旋转电机,称为直流电机,它是能实现直流电能和机械能互相转换的电机。当它作电动机运行时是直流电动机,将电能转换为机械能;作发电机运行时是直流发电机,将机械能转换为电能。
步进电机:步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角。这一线关系的存在,加上步进电机只有周期的误差而无累积误差等特点。使得在速度、位置等控制领域用步进电机来控制变的非常的简单。
伺服电机:伺服电动机又称执行电动机,在自动控制系统中,用作执歇件,把所收到的电信号转换成电动机轴上的角位移或角速度输出。分为直流和交流伺服电动机两大类,其主要特点是,当信号电压为零时无自转现象,转速随着转矩的增加而匀速下降。
这三种电机一般来说成本是直流<步进<伺服,控制精度是直流<步进<伺服(当然也有不一般的时候,并不是说伺服电机就一定比步进电机便宜)。初学者对单片机控制电机不太熟悉,起步可以先用单片机输出的PWM信号来控制直流电机,更进一步可以试着控制步进电机,以求更高的控制精度。对于小车的运动驱动来说,一般可以选用直流电机或步进电机,而伺服电机一般用在机械臂上,用来得到精确的旋转角度。
一般单片机要通过驱动电路来控制步进电机、伺服电机。有专门的??槔锤涸鹎缁?,单片机只需要为这样的??樘峁┮欢ㄆ德实穆龀搴涂刂菩藕啪涂梢粤?。网上相关的资料很多,大家需要的话可以去自己找一下。
购买途径:电子市场、五金商店、网购、旧家电。
终极开发:当你可以自如的控制机器臂的时候,你就会发现,一个类人机器人将不再遥远。
其他的常用驱动装置还有机械臂机械手等,装在小车上去抓取东西??梢宰约豪盟欧缁ⅲǔ跹д咦詈萌菩校部梢匝≡袷忻嫔系某尚筒?,这些产品一般都有完整的文档,仔细阅读,使用起来都是很方便的。
[后记]
最后再介绍一点电子电路开发的东西吧,提起电路,可能很多朋友首先想起来的就是墨绿色的印刷电路板,现在很多电子市场都有人可以根据你的电路图为你加工印刷电路板。不过在设计阶段,很多东西都会改来改去,每次都去重新制作电路板效率和成本都是大问题,一般在电路开发中,有一种专门的实验板(也叫面包板),适合在开发阶段使用。以上就是我写的一点经验之谈,没有写什么具体的技术,只是将新手可能会感到迷茫的一些问题列出来,就像我在前面说的,这篇小文章只能算是一点小点心,真正想要成为机器人高手,还是需要埋头啃一些专业书籍。学习没有捷径,如果你走了捷径,那只能说明你比别人少看了风景。
这篇文章的目的只是想让一些对机器人有兴趣而又不知如何着手的朋友知道制作机器人需要些什么东西,需要哪些知识准备,不入大家法眼,只是希望能有更多的朋友加入到机器人开发的行列中,当然了,我们的作品基本上不会有什么科技价值,也不会填补什么技术空白,不会为社会主义建设添什么砖加什么瓦,纯粹只是自娱自乐。不过我想,当更多的人——尤其是学生,以制作机器人作为一种娱乐项目的时候,应该也是一件令人高兴的事吧,呵呵。




